Quais são as considerações importantes ao avaliar a segurança do cobot?
Contributed By DigiKey's North American Editors
2024-04-03
Os robôs colaborativos (cobots) são projetados para trabalhar com humanos e dar suporte à produção flexível nas fábricas da Indústria 4.0. Em comparação com os robôs industriais tradicionais, os cobots são mais simples, mais fáceis de configurar e não requerem espaços de trabalho isolados por segurança. Como são projetados para trabalhar com pessoas, os cobots são construídos de forma diferente de outros robôs industriais, incluindo recursos como sistemas de detecção de colisão, realimentação de força, atuadores elásticos e servomotores de baixa inércia.
Como eles são diferentes por design, foram desenvolvidos padrões de segurança específicos para os cobots. A Especificação Técnica da Organização Internacional de Normalização (ISO/TS) 15066 especifica os requisitos de segurança para cobots industriais e seus ambientes de trabalho. Ela complementa os requisitos e a orientação sobre a operação de cobot nas normas ISO 10218-1 e ISO 10218-2.
Este artigo analisa brevemente os requisitos da ISO/TS 15066 e como eles se encaixam nas normas ISO 10218-1 e 10218-2. Em seguida, ele considera as complexidades da colaboração, inclusive como o espaço de trabalho colaborativo é definido. Ele examina os fatores relacionados à segurança do robô, como os recursos de segurança incorporados aos cobots, e quais funções de segurança externas são necessárias, juntamente com dispositivos exemplares, como sensores de proximidade, cortinas de luz e tapetes de segurança via contato. Ele termina com uma breve análise de algumas aplicações específicas para considerações de segurança do cobot.
Existem vários padrões de segurança importantes para robôs industriais e cobots. A ISO/TS 15066 detalha os requisitos de segurança para sistemas de cobots industriais e para o ambiente de trabalho e foi elaborada para desenvolver e complementar os requisitos limitados das normas anteriores, como a série ISO 10218. A ISO 10218-1 se concentra em robôs e dispositivos robóticos em geral, enquanto a ISO 10218-2 se concentra em sistemas e integração de robôs. O ANSI/RIA (American National Standards Institute/Robotics Industry Association) R15.06 é uma adoção americana da ISO 10218-1 e da ISO 10218-2.
Complexidades da colaboração
Antes de entrar nos detalhes da segurança do cobot, é útil definir colaboração. A colaboração em robótica é complexa e inclui três fatores:
- Um cobot é um "robô projetado para interação direta com um ser humano em um espaço de trabalho colaborativo definido", de acordo com a ANSI/RIA R15.06.
- Uma operação colaborativa é um "estado no qual um sistema robótico projetado propositadamente e um operador trabalham em um espaço de trabalho colaborativo", de acordo com a ISO/TS 15066.
- Por fim, um espaço de trabalho colaborativo é o "espaço de trabalho dentro do espaço protegido onde o robô e um humano podem realizar tarefas simultaneamente durante a operação de produção", de acordo com a ANSI/RIA R15.06.
Tudo se resume à definição do espaço de trabalho colaborativo "dentro do espaço protegido". O espaço protegido inclui uma camada de proteção por segurança, além das funções de segurança padrão incluídas no cobot.
Os recursos de proteção comuns integrados aos cobots incluem sistemas de detecção de contato baseados em medições de torque em cada junta que monitoram impactos inesperados, obstruções ou forças, ou torque excessivos. Também deve haver sistemas de freio automático e liberação manual do freio para mover o braço sem energia.
O contato inesperado do cobot com a pessoa é uma preocupação especial. Os padrões determinam que o contato deve ser evitado em qualquer parte da cabeça de uma pessoa. Além disso, o padrão divide o corpo em 29 áreas específicas e detalha as limitações para dois tipos de contato:
- O contato transitório é um evento dinâmico e em movimento em que o cobot atinge uma pessoa. As limitações são baseadas na localização, inércia e velocidade relativa.
- O contato quase estático ocorre quando uma parte do corpo fica presa entre o cobot e uma superfície. As limitações são baseadas na pressão e na força relacionadas aos efeitos de esmagamento e fixação.
A especificação fornece orientação, não limites absolutos, com base em considerações da aplicação. Ela também afirma que a orientação é informativa e reflete as práticas recomendadas atuais, uma vez que a colaboração entre pessoas e robôs é um campo novo, e a pesquisa está em andamento.
Continuidade da colaboração
Não existe uma única aplicação colaborativa. As pessoas e os cobots podem interagir e colaborar de várias maneiras. As aplicações colaborativas variam desde a coexistência, em que um robô para de funcionar quando uma pessoa entra no espaço de trabalho colaborativo, até uma atividade interativa com a pessoa tocando o cobot durante a operação (Figura 1).
 Figura 1: A colaboração entre humanos e robôs inclui uma ampla gama de possíveis níveis de interação. (Fonte da imagem: SICK)
Figura 1: A colaboração entre humanos e robôs inclui uma ampla gama de possíveis níveis de interação. (Fonte da imagem: SICK)
É necessária uma avaliação de risco para identificar as necessidades de segurança das aplicações colaborativas individuais. Isso inclui a identificação, a avaliação e a redução dos perigos e riscos associados com a aplicação. A ISO 10218 inclui uma lista de recursos de segurança que podem ser apropriados em várias circunstâncias, mas sem requisitos definitivos. A ISO/TS 15066 traz detalhes adicionais para as avaliações de risco do cobot. Em cada caso, o objetivo da avaliação de risco é identificar os dispositivos e sistemas de segurança externos necessários para garantir a implementação segura das aplicações colaborativas.
Para se aprofundar na avaliação de riscos e nos robôs, consulte o artigo"Integração segura e eficiente de AMRs nas operações da Indústria 4.0 para obter o máximo benefício".
Proteção e eficiência
Embora os cobots sejam projetados para uma operação segura, camadas adicionais de proteção podem melhorar a eficiência das aplicações colaborativas. Sem segurança adicional, quando uma pessoa entra no espaço de trabalho colaborativo, a ISO/TS 15066 exige uma velocidade máxima de 0,25 metros por segundo (m/s) por eixo. Para a maioria dos cobots, isso é muito lento.
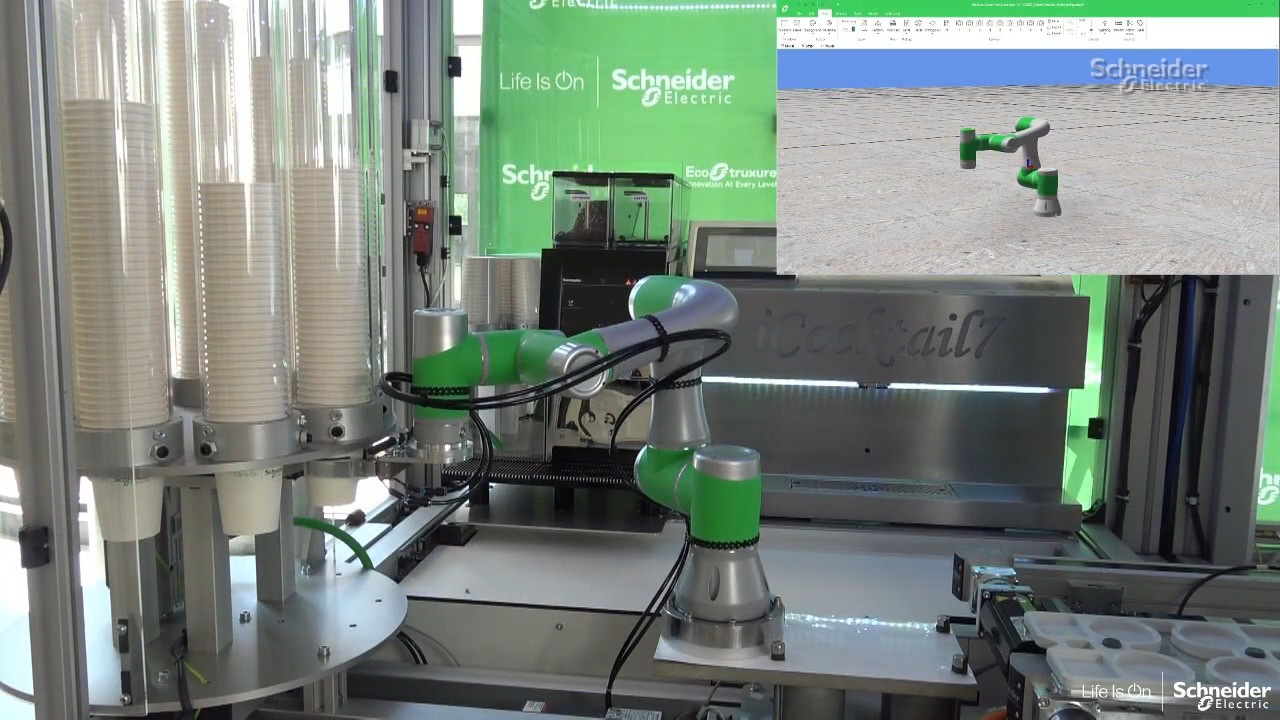
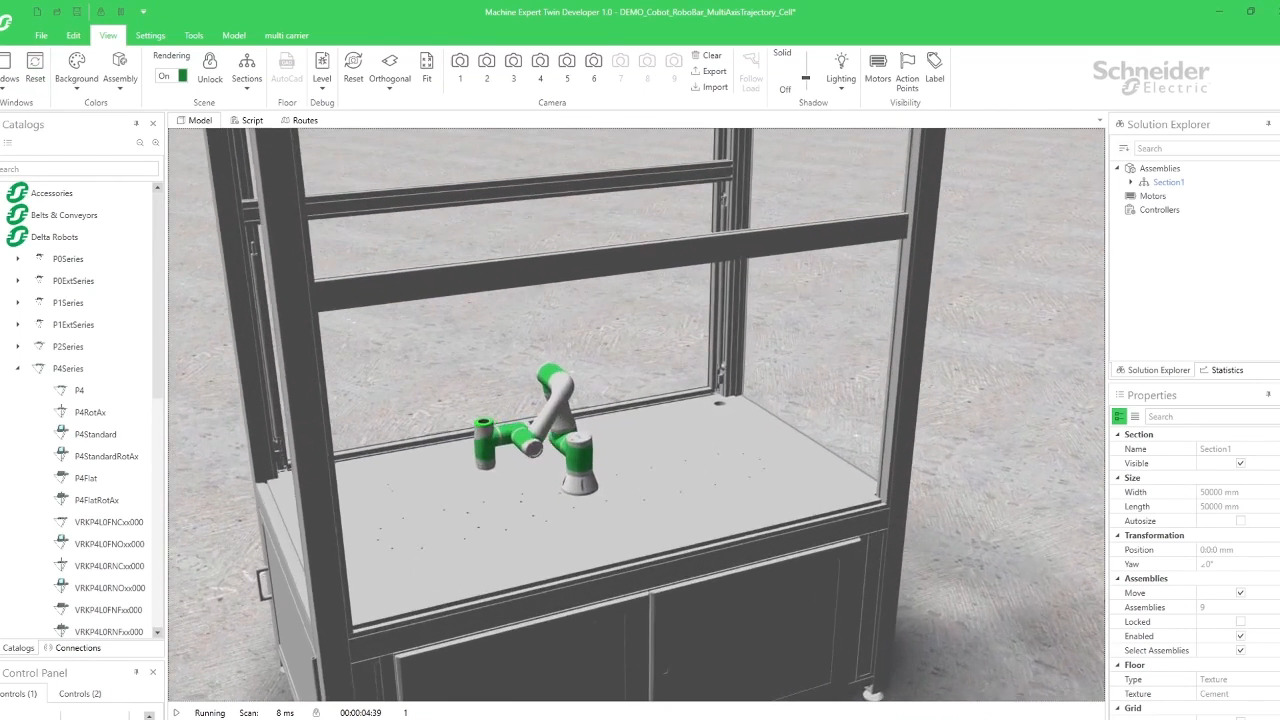
Por exemplo, o cobot Lexium LXMRL12S0000 da Schneider Electric tem uma carga útil máxima de 12 quilogramas (kg), um raio de operação (alcance de trabalho) de 1.327 milímetros (mm), precisão de posicionamento de ±0,03 mm e uma velocidade máxima da extremidade da ferramenta de 3 metros por segundo (m/s), 12 vezes mais rápido do que o máximo permitido pela ISO/TS 15066 quando uma pessoa está no espaço de trabalho colaborativo (Figura 2).
 Figura 2: Este cobot pode se mover 12 vezes mais rápido do que o máximo permitido pela ISO/TS 15066 quando uma pessoa está no espaço de trabalho colaborativo. (Fonte da imagem: Schneider Electric)
Figura 2: Este cobot pode se mover 12 vezes mais rápido do que o máximo permitido pela ISO/TS 15066 quando uma pessoa está no espaço de trabalho colaborativo. (Fonte da imagem: Schneider Electric)
Em muitas aplicações, o cobot pode ficar operando sozinho por longos períodos. Portanto, a detecção da presença ou ausência de pessoas no espaço de trabalho colaborativo pode permitir uma operação muito mais rápida e maior eficiência quando não há ninguém presente. Os dispositivos comuns para detectar a presença de pessoas incluem scanners de segurança, cortinas de luz e tapetes de segurança. Cada tecnologia oferece um conjunto diferente de benefícios e, muitas vezes, são usadas em conjunto.
Scanners de segurança
Os scanners de segurança monitoram uma área designada para detectar a presença de pessoas. Eles podem determinar a distância de uma pessoa e implementar várias zonas de advertência, além da zona de segurança ativa.
O modelo OS32C-SP1-4M da Omron é um bom exemplo de um scanner a laser de segurança projetado para uso com cobots. Ele tem um raio de segurança de até 4 metros (m) e pode suportar várias zonas de advertência de até 15 m. Ele inclui 70 conjuntos padrão de combinações de zonas de segurança e zonas de advertência para dar suporte a espaços de trabalho colaborativos complexos. Além disso, a resolução mínima do objeto pode ser definida como 30, 40, 50 ou 70 mm, e o tempo de resposta pode variar de 80 milissegundos (ms) a 680 ms, aumentando ainda mais a flexibilidade da aplicação (Figura 3).
 Figura 3: Esse scanner de segurança tem um raio de segurança de até 4 m e pode suportar várias zonas de advertência de até 15 m. (Fonte da imagem: DigiKey)
Figura 3: Esse scanner de segurança tem um raio de segurança de até 4 m e pode suportar várias zonas de advertência de até 15 m. (Fonte da imagem: DigiKey)
Cortinas de luz
As cortinas de luz podem medir a presença de pessoas e podem ser projetadas para detectar objetos de vários tamanhos, como dedos ou mãos. Ao contrário dos scanners de segurança, as cortinas de luz não medem a distância. Elas enviam uma série de feixes de luz entre matrizes lineares de emissores e receptores e podem detectar quando um objeto interrompe um ou mais feixes.
Em termos de classificações de segurança, há duas classificações principais de cortinas de luz: Tipo 2 e Tipo 4. Elas têm aparência externa semelhante, mas são projetadas para oferecer níveis diferentes de segurança. O Tipo 4 monitora o espaço protegido que define um espaço de trabalho colaborativo. As cortinas de luz do tipo 2 são projetadas para aplicações de menor risco.
As cortinas de luz protegem os perímetros e estão disponíveis com vários níveis de resolução, como 14 milímetros (mm) para detecção de dedos e 24 mm para detecção de mãos. O modelo, SLC4P24-160P44 da Banner Engineering, é um kit de cortina de luz Tipo 4 com uma matriz de emissores e receptores e tem uma resolução de 24 mm para proteger pessoas e máquinas como cobots (Figura 4). Os emissores têm uma fileira de diodos emissores de luz infravermelha modulada em sincronismo. Os receptores têm uma fileira correspondente de fotodetectores sincronizados. Os emissores têm um alcance de 2 metros, e essas cortinas de luz podem ser instaladas em comprimentos de 160 a 320 mm com incrementos de 80 mm.
 Figura 4: Essa cortina de luz Tipo 4 tem uma resolução de 24 mm. (Fonte da imagem: Banner Engineering)
Figura 4: Essa cortina de luz Tipo 4 tem uma resolução de 24 mm. (Fonte da imagem: Banner Engineering)
Os scanners de segurança a laser e as cortinas de luz oferecem meios sem contato para aumentar a segurança dos espaços de trabalho colaborativos. No entanto, podem ser difíceis de usar em ambientes opticamente desafiadores, como áreas com superfícies altamente reflexivas que podem enviar interferências indesejadas de luz, e podem disparar devido a vazamentos de óleo ou graxa, poeira ou umidade excessiva.
Alguns desses sensores ópticos incluem ajustes de sensibilidade que podem ajudar a atenuar determinados tipos de interferência. Esses ajustes de sensibilidade também podem aumentar os tempos de resposta e outros comprometimentos de desempenho. Outra solução é usar um tapete de segurança junto com dispositivos de detecção óptica.
Tapetes de segurança via contato
Os tapetes de segurança têm duas placas condutoras separadas por uma camada isolante gradeada e podem ser usados sozinhos ou em combinação com outros tipos de sensores. Se uma pessoa pisar no tapete, a placa condutora superior é pressionada e entra em contato com a placa inferior, disparando um sinal de alerta (Figura 5). O exterior dos tapetes é um material de poliuretano antiderrapante e impermeável à água, sujeira e óleo. O tapete SENTIR modelo 1602-5533 da ASO Safety Solutions pode conectar até 10 tapetes em série a uma única unidade de monitoramento para uma cobertura máxima de 10 m2.
 Figura 5: Quando pisadas, as camadas condutoras superior e inferior do tapete de segurança fazem contato, disparando um sinal de alerta. (Fonte da imagem: ASO Safety Solutions)
Figura 5: Quando pisadas, as camadas condutoras superior e inferior do tapete de segurança fazem contato, disparando um sinal de alerta. (Fonte da imagem: ASO Safety Solutions)
A segurança está nos detalhes
Não existe uma fórmula única que garanta a segurança. Cada aplicação colaborativa é diferente e precisa ser tratada com base em suas características e necessidades exclusivas. Um fator importante é: onde a aplicação se encontra na continuidade da colaboração (consulte a Figura 1)? Quanto mais próxima for a interação entre o cobot e as pessoas, maior será a necessidade de proteção.
Há mais detalhes a serem considerados. Alguns deles incluem:
- Cada local precisa ser submetido a uma avaliação de risco detalhada para verificar se o cobot foi movido de uma estação de trabalho para outra. Mesmo que pareçam iguais, pequenas variações podem fazer diferença na segurança.
- Se outras máquinas estiverem no espaço de trabalho colaborativo, elas precisam estar vinculadas ao sistema de desligamento ou à desaceleração de segurança do cobot?
- Este artigo concentrou-se no hardware relacionado à segurança, mas para sistemas em rede que são cada vez mais comuns, a segurança cibernética é uma consideração importante para evitar interferência na operação do cobot ou nos sistemas de segurança.
Conclusão
A segurança do cobot é complexa. Ela começa com a definição do espaço de trabalho colaborativo dentro do espaço protegido e exige uma avaliação de risco da operação colaborativa. Normas como a ISO/TS 15066 e a série ISO 10218 são importantes e fornecem recomendações e diretrizes. Os cobots incluem recursos básicos de segurança, como sistemas de detecção de colisão, realimentação de força, atuadores elásticos e servomotores de baixa inércia. Dependendo das especificidades da aplicação colaborativa, podem ser necessários dispositivos de segurança adicionais, como sensores de proximidade, cortinas de luz e tapetes de segurança via contato.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.