Como implementar rapidamente módulos GNSS de posicionamento multiconstelação
Contributed By DigiKey's North American Editors
2021-09-09
O uso de funções baseadas na posição utilizando receptores do sistema global de navegação por satélite (GNSS) multiconstelação para o Galileo da Europa, o Sistema Global de Posicionamento (GPS) dos EUA, o GLONASS da Rússia, o sistema de navegação por satélite BeiDou da China e o QZSS do Japão está crescendo em uma gama de aplicações, incluindo robótica, veículos autônomos, automação industrial, logística e rastreamento de ativos, drones e equipamentos agrícolas e de construção pesada. Os benefícios do uso de receptores GNSS multiconstelação incluem: melhor disponibilidade dos sinais de posição, navegação, temporização (PNT), maior precisão e integridade, e maior robustez de aplicação.
Mas desenvolver receptores multiconstelação é uma atividade complexa e demorada que inclui: otimização da antena da banda L; projeto do front end de radiofreqüência (RF); integração dos algoritmos de processamento de sinais da banda base para adquirir, rastrear e aplicar correções aos vários sinais PNT; codificação do software de processamento da aplicação para extrair dados PNT de cada canal da banda base e usar as informações para implementar as funções do sistema. Os projetistas também devem escolher uma antena apropriada e colocá-la corretamente.
Como alternativa, os projetistas podem recorrer a módulos GNSS pré-projetados e ambientes de desenvolvimento para integrar rápida e eficientemente a capacidade de posicionamento em um sistema. Estes módulos GNSS incluem o front-end RF, o processamento da banda base e o firmware incorporado para acelerar o desenvolvimento de software de processamento de aplicações. Alguns módulos do GNSS também incluem as antenas.
Este artigo revisa o básico do GNSS, PNT e a operação de receptores GNSS multiconstelação. Em seguida, analisa os prós e contras da integração de antenas em módulos GNSS antes de introduzir vários módulos GNSS — com e sem antenas integradas — bem como as placas de avaliação associadas da STMicroelectronics, Septentrio e Würth Elektronik que os projetistas podem aplicar para o desenvolvimento eficiente e econômico de aplicações baseadas em posição precisa e robusta.
O que são GNSS e PNT?
GNSS e PNT são conceitos intimamente relacionados. Os satélites GNSS são a fonte mais comum de sinais PNT. Os satélites GNSS são essencialmente relógios sincronizados de alta precisão que transmitem constantemente suas informações PNT. Um módulo GNSS recebe sinais PNT de um determinado satélite e calcula sua distância a partir desse satélite. Quando o receptor sabe a distância até pelo menos quatro satélites, ele pode estimar sua própria posição. Entretanto, a precisão da estimativa da posição é afetada por uma variedade de fontes de erro, inclusive:
- Desvio do relógio do circuito de temporização em satélites GNSS
- Imprecisões na previsão da posição orbital exata dos satélites GNSS
- Desvio de desempenho geral no equipamento geral do satélite em relação a outros satélites, relacionado ao erro sistemático do satélite
- Distorções e atrasos na transmissão do sinal ao passar pela ionosfera e troposfera.
- Reflexão de vários caminhos e desempenho variável e deriva no receptor
Há várias técnicas disponíveis para os projetistas corrigirem os erros GNSS atmosféricos e baseados em satélites.
Melhorando o desempenho do GNSS
A melhor maneira de minimizar o impacto de erros originados no receptor GNSS é usar o receptor de maior desempenho que se ajuste às restrições de custo e tamanho de uma determinada aplicação. Mas mesmo os receptores de alto desempenho não são perfeitos; seu desempenho pode muito provavelmente ser melhorado. É importante compreender estes métodos de correção, pois eles oferecem desempenho variável e alguns módulos GNSS não são capazes de implementar todos eles.
As estações de referência terrestres são utilizadas por vários métodos de correção GNSS (Figura 1). Os métodos mais estabelecidos para utilizar estações de referência terrestres para fornecer correções GNSS aos receptores são o Real-Time Kinematic (RTK) e o Precise Point Positioning (PPP). Mais recentemente, os métodos híbridos RTK-PPP se tornaram disponíveis.
 Figura 1: Um receptor GNSS do usuário pode obter informações sobre erros atmosféricos, de relógio e de órbita a partir de uma rede de referência para melhorar a precisão do posicionamento. (Fonte da imagem: Septentrio)
Figura 1: Um receptor GNSS do usuário pode obter informações sobre erros atmosféricos, de relógio e de órbita a partir de uma rede de referência para melhorar a precisão do posicionamento. (Fonte da imagem: Septentrio)
O método RTK conta com uma única estação base ou uma rede de referência local para a correção de dados que podem eliminar a maioria dos erros do GNSS. O RTK assume que a estação base e o receptor estão próximos — no máximo 40 quilômetros (km) — para que eles experimentem os mesmos erros. O Kinematic pós-processado ou PPK é uma variação do RTK e é amplamente utilizado em levantamentos e mapeamentos para obter dados de posicionamento de alta precisão ou precisão de nível de centímetro.
Somente os erros de órbita e de relógio do satélite são usados para fazer correções PPP. Estes erros específicos do satélite são independentes da localização do usuário, o que limita o número de estações de referência que são necessárias. Entretanto, o PPP não é responsável por erros relacionados à atmosfera e, portanto, tem menor precisão em relação ao RTK. Além disso, as correções PPP podem ter tempos de inicialização de cerca de 20 minutos. O maior tempo de inicialização e a menor precisão tornam o PPP impraticável para muitas aplicações.
As aplicações que necessitam de precisão próxima ao RTK e tempos de inicialização rápida frequentemente empregam o mais novo serviço de correção GNSS, RTK-PPP (às vezes referido como representação de espaço de estados (SSR)). Utiliza uma rede de referência com estações espaçadas cerca de 100 km que coleta dados GNSS e calcula uma combinação de correções de satélite e atmosféricas. A rede de referência utiliza redes de Internet, satélite ou telefonia móvel para enviar os dados de correção aos assinantes. Os receptores GNSS que utilizam RTK-PPP podem ter precisões abaixo do decímetro. A escolha de usar os métodos de correção RTK, PPP e RTK-PPP envolve uma série de compromissos de projeto que os desenvolvedores precisam rever para selecionar a solução ótima para o perfil específico da aplicação. (Figura 2).
 Figura 2: Pontos fortes e fracos de três métodos comuns de correção do GNSS. (Fonte da imagem: Septentrio)
Figura 2: Pontos fortes e fracos de três métodos comuns de correção do GNSS. (Fonte da imagem: Septentrio)
Os sistemas de aumento por satélite (SBAS) estão começando a ficar disponíveis em uma base regional para substituir os métodos de correção baseados em estações terrestres RTK, PPP e RTK-PPP. O sistema SBAS ainda usa estações terrestres para medir erros GNSS, mas as estações estão espalhadas por continentes inteiros. Os erros medidos são processados em um local central onde as correções são calculadas e transmitidas aos satélites geossíncronos sobre a área coberta. Os dados de correção são transmitidos a partir dos satélites como uma sobreposição ou aumento dos dados GNSS originais.
A precisão do GNSS depende da disponibilidade e da precisão das medições via satélite e correções associadas. Os receptores GNSS de alto desempenho rastreiam os sinais GNSS em várias freqüências e utilizam várias constelações GNSS e vários métodos de correção para proporcionar a precisão e a resiliência necessárias. A redundância resultante permite um desempenho estável, mesmo que algumas das medições e dados de satélite sofram interferência. Os projetistas podem selecionar entre uma variedade de capacidades de precisão e redundância do GNSS (Figura 3).
 Figura 3: Graus de precisão GNSS com métodos de correção correspondentes e aplicações selecionadas. (Fonte da imagem: Septentrio)
Figura 3: Graus de precisão GNSS com métodos de correção correspondentes e aplicações selecionadas. (Fonte da imagem: Septentrio)
Módulos GNSS: antenas integradas vs antenas externas
Devido à complexidade do posicionamento multiconstelação, estão disponíveis módulos de vários fornecedores que ajudam a acelerar o tempo de colocação no mercado, reduzir os custos e garantir o desempenho. Dito isto, os projetistas precisam considerar se devem usar uma antena interna ou, ao invés disso, optar por uma que resida externa ao módulo GNSS. Para aplicações onde o tempo para comercializar e o custo são prioritários, uma antena integrada pode ser preferível, já que há muito menos engenharia envolvida. Para aplicações que necessitam de certificação FCC ou CE, o uso de um módulo com uma antena integrada também pode acelerar o processo de aprovação. Entretanto, o tamanho da solução pode aumentar, e a flexibilidade pode ser limitada com soluções de antenas integradas.
As antenas externas oferecem aos projetistas uma gama mais ampla de opções de desempenho e layout. Uma antena grande de alto desempenho ou uma antena menor e de menor desempenho pode ser selecionada. Além disso, a colocação da antena é mais flexível em relação à localização do módulo GNSS, melhorando ainda mais a flexibilidade do projeto. A flexibilidade de colocação também permite que as antenas externas ofereçam uma operação GNSS mais confiável. Entretanto, a colocação de antenas e o roteamento de conexões pode ser um processo complexo e demorado e requer conhecimentos específicos, aumentando potencialmente os custos e diminuindo o tempo de colocação no mercado.
Pequeno módulo GNSS para projetos com limitações de espaço
Equipes de projeto com a experiência necessária na colocação e roteamento de antenas podem utilizar o Teseo-LIV3F da STMicroelectronics, um módulo GNSS multiconstelação (GPS/Galileo/GLONASS/BeiDou/QZSS) que utiliza uma antena externa (Figura 4). O módulo vem em um invólucro LCC-18 medindo 9,7 mm x 10,1 mm, e apresenta 1,5 metro (m) de erro circular provável (CEP) de precisão de posição, com um tempo para a primeira correção (TTFF) para partida a frio e quente abaixo de 32 segundos (s) e abaixo de 1,5 s, respectivamente (GPS, GLONASS). Tem um consumo de potência em espera de 17 microwatts (µW) e um consumo de potência de rastreamento de 75 milliwatts (mW).
 Figura 4: O módulo Tesco-LIV3F GNSS inclui o núcleo e subsistemas GNSS, mais toda a conectividade e o gerenciamento de energia necessários, em um invólucro medindo 9,7 x 10,1 mm. Ele requer uma antena externa. (Fonte da imagem, STMicroelectronics)
Figura 4: O módulo Tesco-LIV3F GNSS inclui o núcleo e subsistemas GNSS, mais toda a conectividade e o gerenciamento de energia necessários, em um invólucro medindo 9,7 x 10,1 mm. Ele requer uma antena externa. (Fonte da imagem, STMicroelectronics)
O oscilador de cristal de 26 megahertz (MHz) de temperatura compensada (TCXO) da Tesco-LIV3F integrado ajuda a garantir alta precisão, e o oscilador dedicado de 32 quilohertz (kHz) de relógio em tempo real (RTC) permite um tempo reduzido para a primeira correção (TTFF). Características como registro de dados, GNSS assistido autônomo de sete dias, reconfigurabilidade de firmware (FW), bem como atualizações de FW, são habilitados pela memória flash embutida de 16 megabits (Mbit).
As aplicações adequadas para o Tesco-LIV3F incluem seguros, logística, drones, pedágio, sistemas anti-roubo, localização de pessoas e animais de estimação, rastreamento de veículos e chamadas de emergência.
Como solução pré-certificada, o uso do módulo Teseo-LIV3F pode resultar em um tempo reduzido para a comercialização da aplicação final. Tem uma faixa de temperatura de operação de -40 °C a +85 °C.
Para experimentar o módulo e acelerar o desenvolvimento da aplicação, os projetistas podem usar a placa de avaliação AEK-COM-GNSST31. Quando usado em conjunto com o firmware X-CUBE-GNSS1, o pacote de avaliação pode suportar a funcionalidade de aquisição, rastreamento, navegação e saída de dados sem memória externa. Esta EVB também foi projetada para uso com um microcontrolador SPC5 para o desenvolvimento de aplicações automotivas.
Módulo GNSS com mitigação de interferência
O receptor GNSS multiconstelação mosaic-X5 410322 da Septentrio é um módulo de baixa potência, montado em superfície, medindo 31 mm x 31 mm x 4 mm que fornece aos projetistas uma gama de interfaces, incluindo quatro UARTs, Ethernet, USB, SDIO e dois GPIOs programáveis pelo usuário.
Projetado para uso em robótica, sistemas autônomos e outras aplicações no mercado de massa, o mosaic-X5 apresenta uma taxa de atualização de 100 Hertz (Hz), uma latência de menos de 10 milissegundos (ms), e uma precisão de posicionamento vertical e horizontal RTK de 0,6 cm e 1 cm, respectivamente. Ele pode rastrear todas as constelações GNSS, suportando sinais atuais e futuros, e é compatível com correções PPP, SSR, RTK e SBAS. O TTFF do módulo é inferior a 45 s em partida a frio e inferior a 20 s em partida a quente.
O mosaic-X5 apresenta várias tecnologias patenteadas pela Septentrio, incluindo AIM+, uma tecnologia de mitigação de interferências integrada que suprime uma variedade de interferentes, desde simples sinais contínuos de banda estreita até complexos bloqueadores de banda larga e pulsantes.
As interfaces, comandos e mensagens de dados dos módulos estão totalmente documentados. O software RxTools incluído permite a configuração e monitoramento do receptor, assim como o registro e análise de dados.
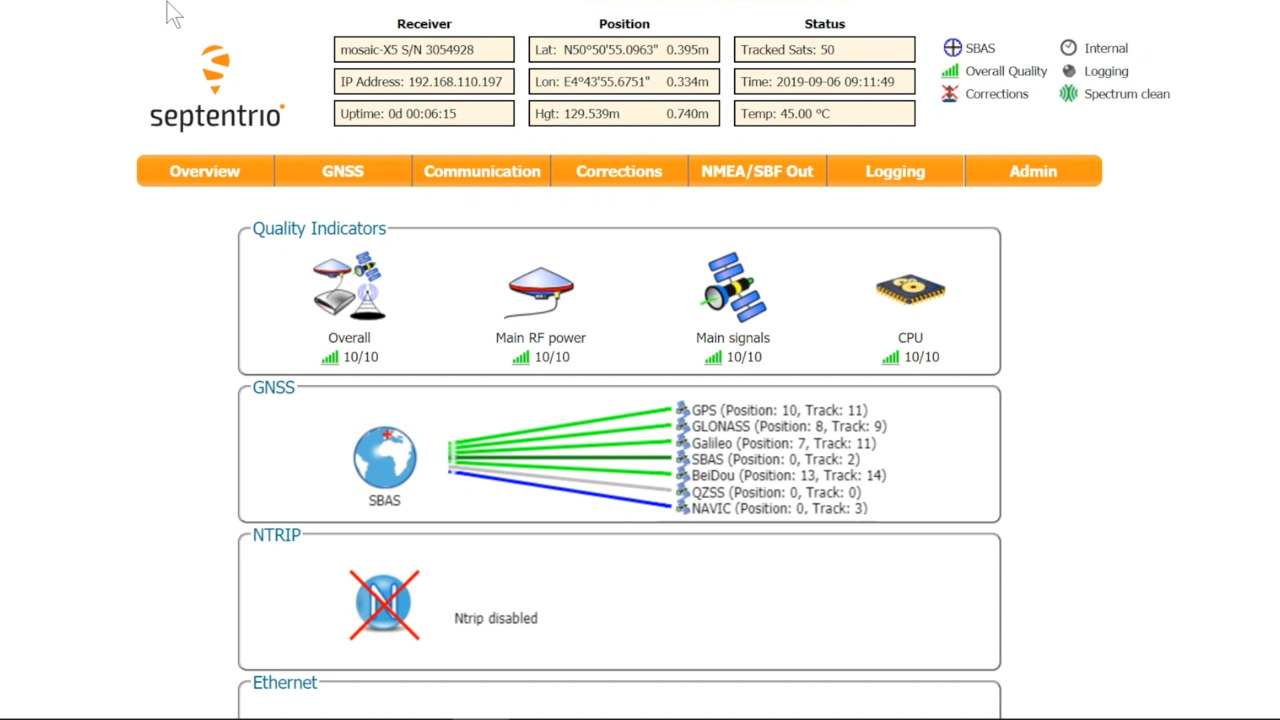
O kit de desenvolvimento mosaic-X5 410331P3161 da Septentrio permite aos projetistas explorar, avaliar e desenvolver protótipos que aproveitam ao máximo as capacidades do mosaic-X5 (Figura 5).
 Figura 5: Os projetistas podem criar um protótipo usando o kit de desenvolvimento mosaic-X5 410331P3161 usando uma variedade de conexões, incluindo Ethernet, portas COM ou USB 2.0, ou usando um cartão de memória SD. (Fonte da imagem: Septentrio)
Figura 5: Os projetistas podem criar um protótipo usando o kit de desenvolvimento mosaic-X5 410331P3161 usando uma variedade de conexões, incluindo Ethernet, portas COM ou USB 2.0, ou usando um cartão de memória SD. (Fonte da imagem: Septentrio)
O kit utiliza a interface de usuário intuitiva da web do mosaic-X5 para fácil operação e monitoramento, permitindo aos projetistas controlar o módulo receptor a partir de qualquer dispositivo móvel ou computador. A interface web usa indicadores de qualidade de fácil leitura para monitorar a operação do receptor.
Os projetistas podem criar um protótipo integrando o kit de desenvolvimento mosaic usando qualquer uma das seguintes conexões: Ethernet, portas COM, USB 2.0, cartão de memória SD.
Módulo GNSS com antena integrada
Para projetistas de aplicações que podem se beneficiar do uso de um módulo GNSS com antena integrada, a Würth Elektronik oferece o módulo Erinome-I 2614011037000 com um sistema em chip (SoC) de alto desempenho (Figura 6). O módulo suporta as constelações GNSS GPS, GLONASS, Galileo e BeiDou, e vem com uma antena integrada no topo que simplifica a integração do hardware e reduz o tempo de colocação no mercado. O módulo, incluindo a antena integrada, mede 18 mm x 18 mm.
 Figura 6: O 2614011037000 Erinome-I é um módulo GNSS completo com um GNSS SoC de alto desempenho mais uma antena integrada. (Fonte da imagem: Würth Elektronik)
Figura 6: O 2614011037000 Erinome-I é um módulo GNSS completo com um GNSS SoC de alto desempenho mais uma antena integrada. (Fonte da imagem: Würth Elektronik)
Também estão incluídos no módulo o TCXO, filtro RF, amplificador de baixo ruído (LNA), e memória flash serial.
A Würth também oferece a placa de avaliação 2614019037001 (EVB) para a Erinome-I (Figura 7). A EVB também pode servir como um projeto de referência para a integração do módulo GNSS em uma aplicação. Uma porta USB pode ser usada para conectar a EVB a um PC. Um conector multi-pinos dá aos projetistas acesso a todos os pinos do módulo GNSS.
 Figura 7: A placa de avaliação 2614019037001 para o Erinome-I (perto do centro da placa, com a antena integrada visível no centro do módulo) também atua como um projeto de referência. (Fonte da imagem: Würth Elektronik)
Figura 7: A placa de avaliação 2614019037001 para o Erinome-I (perto do centro da placa, com a antena integrada visível no centro do módulo) também atua como um projeto de referência. (Fonte da imagem: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) é uma ferramenta simples de PC para interagir com o módulo Erinome-I GNSS usando a interface UART. Suporta:
- Controle do funcionamento da placa (EVB)
- Comunicação bidirecional com o módulo Erinome-I
- Avaliação das características e capacidades do Erinome-I
- Familiarização com os protocolos, sentenças e comandos do Erinome-I
- Configuração do Erinome-I sem o conhecimento dos protocolos
- Análise de sentenças e comandos utilizados pelo Erinome-I
A WENSS permite uma avaliação fácil das aplicações de posicionamento sem conhecimentos avançados. Desenvolvedores experientes também podem usar o WENSS para configurações mais avançadas.
Conclusão
A capacidade de posicionamento preciso e confiável é melhor alcançada utilizando múltiplas constelações com suporte de tecnologia de correção associada. Estes são sistemas complexos, mas os projetistas podem recorrer a módulos GNSS pré-projetados, kits de desenvolvimento associados e ambientes para comparar opções de forma rápida e eficiente e implementar recursos e serviços baseados em posição.
Leitura recomendada
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.